LIDAR, or light detection and ranging, is the technology that allows autonomous vehicles to detect an obstacle and avoid hazards in different driving environments. Researchers at Stanford University have come up with a more advanced imaging system than LIDAR: it can see objects around corners and hidden from view, using extremely sensitive laser detecting technology.
LIDAR system is currently the most common guidance systems in semi- and fully autonomous cars. It measures the distance to a target by illuminating the target with pulsed laser light and measuring the reflected pulses with a sensor. To keep navigation safe every second, most autonomous vehicles use rotating laser beams. The very first generations of automotive adaptive cruise control systems used only lidar sensors
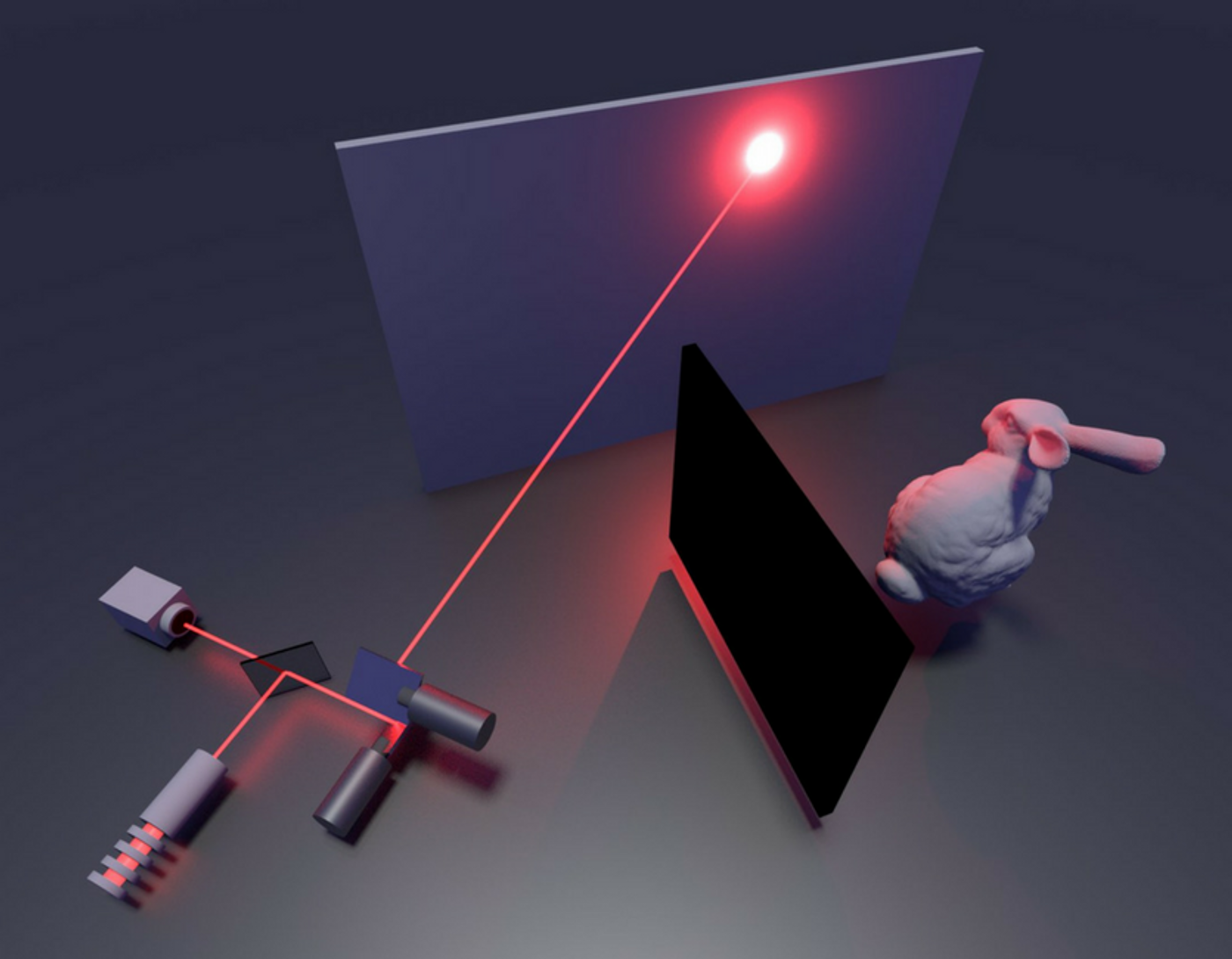
In their design, Stanford researchers set a laser next to a highly sensitive photon detector that can measure a single particle of light. They pulsed invisible laser light to human eyes to the wall, which reflected those pulses onto objects around the corner. From the object, the reflected photons return to the detector through the same route.
Throughout this process, light particles are often scattered and cannot be detected using the conventional LIDAR system. (light particles are forced to deviate from its original trajectory due to non-uniformities in the medium.) As a matter of fact, scattered light is intentionally ignored by LIDAR for the accuracy of ranging. The Stanford crew applied an algorithm to untangles the light paths captured by the detector and enhanced the clarity of images so that the final view of the hidden objects were no longer out of focus and blurry.
Based on the environment, nature of the object, and the lighting condition, this scan can take from two minutes to an hour, which is nowhere to close to its intended application in the autonomous driving. The researchers think they could speed it up so that it is nearly instantaneous once the scan is complete.
"We believe the computation algorithm is already ready for LIDAR systems," said Matthew O'Toole, a postdoctoral scholar in the Stanford Computational Imaging Lab and co-lead author of the paper. "The key question is if the current hardware of LIDAR systems supports this type of imaging."
The researchers tested their design successfully out of their laboratory, but they worked only with indirect light. Their technology worked better with retroreflective objects, such as safety apparel or traffic signs. According to them car equipped with their laser and detector combo can detect things like road signs, safety vests or road markers, but probably not a person wearing non-reflective clothing.
"It sounds like magic, but the idea of non-line-of-sight imaging is feasible," said Gordon Wetzstein, assistant professor of electrical engineering and senior author of the paper describing this work, published this March in Nature.
Stanford researchers develop tech to reveal objects hidden around corners. Credit: Stanford
Source: Stanford University